产品
卡诺普焊接/搬运专家
始于焊接,不止于焊接
始于焊接,不止于焊接


在智能制造转型升级的关键阶段,传统工业机器人受限于手腕关节传动结构的技术瓶颈,在打磨、压铸、机加工等高负载、硬接触工艺场景中,普遍存在刚性不足、轨迹抖动、吃刀不准、跳刀等问题,难以满足高刚性、高精度的工艺要求。在切割、抛光、焊接等对运动性能要求严苛的应用中,复杂曲线轨迹易失真,高速运行下易出现过冲,制约了高速度与高精度的协同实现。
针对上述挑战,卡诺普依托全栈自主研发能力,创新融合准双曲面齿轮传动与高惯量轴设计,大幅提升关节刚性和系统稳定性,成功推出CRP-RH15-15-HP、CRP-RH18-25-HP、CRP-RH18-35-HP系列高性能工业机器人。该系列产品具备高刚性、高精度的特点、卓越动态响应和持续高速运行的能力,特别适用于各类硬接触、高负载、高节拍的严苛工业场景,为复杂工艺应用提供了兼具高刚性、高精度、高速度与硬接触适应能力的革命性解决方案。
技术突破 持续提升性能边界
01
结构创新
卡诺普全能工业机器人以 “高过载、高防护、大中空、长寿命” 为特性,其 4、5、6 轴采用全新准双曲面齿轮传动技术路线,可同步实现高刚度、耐冲击、长寿命性能,且末端中空直径达57mm。配合 1、2、3 轴采用新型高刚度、高扭矩的减速机,使整机刚度比传统工业机器人提升 100%。此外,大中空结构不仅减少外置走线干扰,同时实现 IP67 级防护,可稳定适配打磨、机床上下料、切割、焊接等多类工业应用场景。
02
碰撞检测能力与过载能力提升
在复杂多变的工业作业场景中,机器人的抗过载稳定性与碰撞防护能力是保障生产连续性的关键。卡诺普全能机器人依托卓越的抗过载结构设计,其过载承载能力较传统工业机器人提升50%,确保在极端工作条件下依然稳定运行。同时,其内置的碰撞检测系统,通过先进的动力学碰撞检测技术,实时感知外力冲击,有效避免机器人因碰撞而损坏或产生位置偏差。
03
先进的机器人控制算法
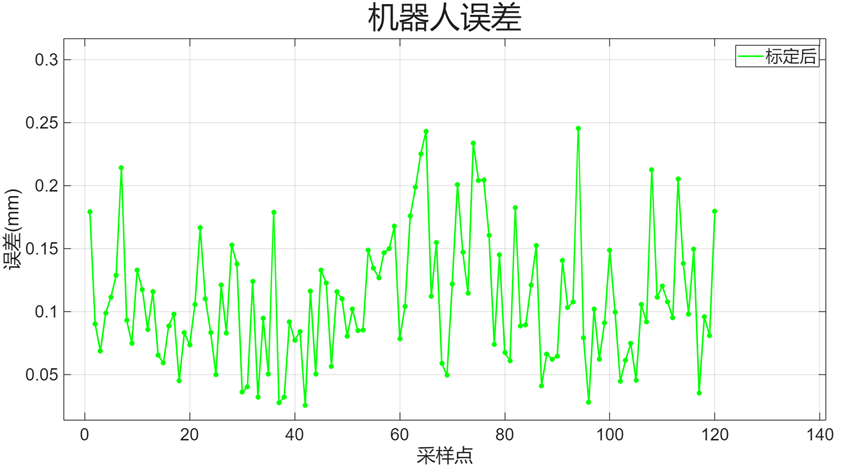
通过抖动抑制与动态补偿技术,卡诺普全能工业机器人在大姿态变化时仍能保持轨迹精度,比传统工业机器人综合节拍提高25%-30%,精度提高30%,确保打磨、切割、上下料等精细作业的质量与效率。在1000mm*1000mm的范围中按照10mm的间距生成矩阵点位,实测机器人定位精度在0.3mm内。
多场景应用 效率与可靠的双重保障
卡诺普机器人深度聚焦金属成型、精密制造等领域的工艺痛点,依托全能工业机器人去毛刺、自适应抛光、打磨、机床上下料、切割、压铸等核心工艺,已为汽车零部件、消费电子、日用五金、航空航天、医疗等行业提供定制化、智能化解决方案,为企业数字化转型赋能。
01
机器人打磨、去毛刺应用
行业应用难点
1.编程流程复杂、耗时较长,导致作业启动效率低;
2.作业中机器人姿态变化幅度大,同时对运行速度与定位精度要求严苛;
3.生产模式以小批量、多品种为主,对机器人柔性适配能力要求高;
4.机器人与工件刚性接触作业时,易出现本体使用寿命缩短、精度丢失问题。
对应解决方案
1.解决刚性接触痛点:采用高刚性本体设计,整机刚度较传统机器人提升100%,过载能力提升50%,有效延长刚性接触场景下的使用寿命,减少精度损耗
2.匹配高速高精度需求:搭载先进机器人控制算法,综合精度较传统机器人提升30%,整机作业节拍提升25%-30%,从容应对大姿态变化下的速度与精度要求
3.便捷编程:匹配E型竖式示教器,编程效率提升30%。同时兼容离线编程软件,可轻松处理复杂编程轨迹,大幅缩短编程耗时

4.适配柔性生产与场景需求:可针对小批量多品种生产场景,定制智能化作业解决方案。且能轻松匹配力控打磨头,简化打磨类刚性接触作业的调试与应用。